|
|
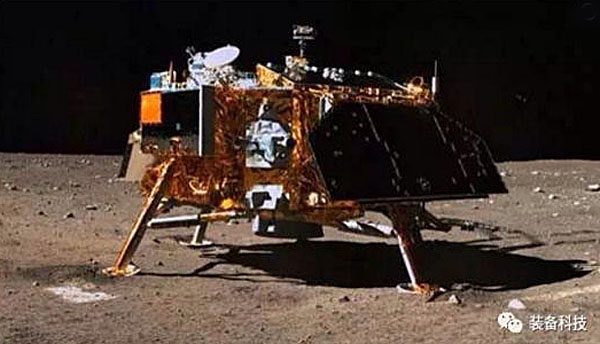
Le rover de
Chang'e-4. |
Sitôt posé, l'etterrisseur déploiera deux
rampes afin de permettre au rover de descendre et prendre son
autonomie.
Il s'agit d'un engin autonome à six roues,
d'une masse de 140 kg dont 20 kg de charge utile et haut de 1,5
mètre. Il est surmonté d'un mât supportant les caméras de navigation
et panomarique ainsi que l'antenne parabolique de communication.
L'énergie lui est fournie par des panneaux solaires et sa durée de
vie prévue est de trois jours et trois nuits lunaires, soit environ
90 jours terrestres.
La locomotion est assurée par six moteurs
électriques, un par roue, alimentés en courant continu. Capable de
grimper une pente inclinée à 20° et de franchir des obstacles de 20
cm de haut, il pourra parcourir une distance maximale de 10 km et
explorer une surface de 3 km².
Un algorithme de navigation analysera les
images fournies par les caméras de navigation et celles destinées à
éviter les obstacles, afin d'en déduire la route à suivre. Il est
prévu qu'il puisse aussi être dirigé par un opérateur humain, compte
tenu de la durée des communications (2,5 secondes aller-retour pour
le signal).
Instrumentation scientifique de la mission est
répartie entre ses divers éléments.
Instrumentation de l'atterrisseur
- La caméra LCAM (Landing Camera) utilisée
pour prendre des photos durant la descente.
- La caméra topographique TCAM ( Terrain
Camera).
- Le spectromètre LFS (Low Frequency
Spectrometer) pour la détection des variations du champ
électrique basse fréquence générées par les tempêtes solaire, et
cela depuis une situation privilégiée puisque la Lune fait écran
avec la Terre. Les données collectées permettront d'étudier le
plasma lunaire présent au-dessus du site d'atterrissage.
- Le dosimètre à neutrons LND (Lunar Lander
Neutrons and Dosimetry) fourni par l’université de Kiel en
Allemagne mesurera la quantité d'eau présente dans le régolithe
lunaire dans le but de préparer de futures missions habitées.
Ses 10 détecteurs au silicium permettent de mesurer les protons
ayant une énergie comprise entre 10 et 30 MeV, les électrons
dont l'énergie est comprise entre 60 et 500 keV, les particules
alpha de 10 à 20 MeV par noyau et les ions lourds de 15 à 40
MeV. Deux détecteurs utilisant un sandwich Gd mesurent les flux
de neutrons thermiques qui permettent de déterminer la présence
d'eau dans le sous-sol et de déterminer les processus qui
brassent la couche superficielle du sol.
- Un container de 3 kilogrammes contenant
des graines de pommes de terre et d'arabidopsis dans le but
d'étudier la respiration des graines et la photosynthèse sur le
sol lunaire. La température à l'intérieur de cette
mini-biosphère est maintenue entre 1 et 30°C tandis que
l'humidité et les éléments nutritionnels sont strictement
contrôlés. La lumière solaire est canalisée par fibres optiques
vers les plantes pour permettre leur croissance. L'expérience a
été conçue conjointement par 28 universités.
Instrumentation du rover
- La caméra panoramique PCAM (Panoramic
Camera) fournira des images tridimensionnelles de la zone
d'atterrissage et des régions explorées par le rover et
permettront de déterminer la morphologie de la surface et la
structure géologique.
- Le spectromètre imageur VNIS (Visible and
Near-Infrared Imaging Spectrometer) fonctionne en lumière
visible et en infrarouge. La partie lumière visible fonctionne
dans les longueurs d'ondes 0,45-0,95 microns et la partie
infrarouge dans la bande 0,9-2,4 microns).
- Le radar LPR (Lunar Penetrating Radar) a
pour but d'étudier les structures géologiques du sous-sol et de
cartographier le régolithe lunaire.
- L'analyseur d'atomes neutres ASAN
(Advanced Small Analyzer for Neutrals), fourni par la Suède, est
similaire à un instrument ayant volé sur l'orbiteur lunaire
indien Chandrayaan-1 et doit analyser les structures
souterraines proches de la surface.
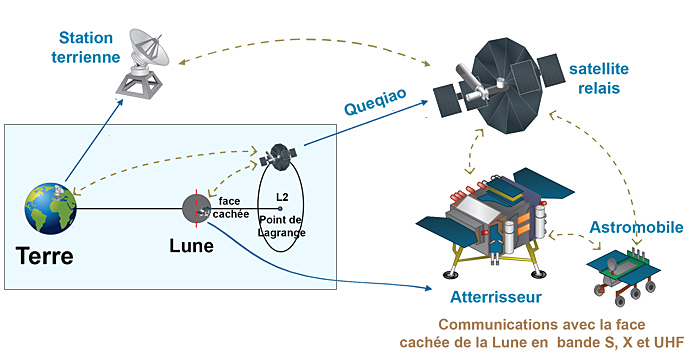
Communications
La Terre n'étant jamais visible depuis la face
cachée de la Lune, les communications entre Chang'e-4 et le sol
seront assurées par le satellite de communications relais Queqiao,
qui a été lancé le 20 mai 2018, 6 mois avant le rover afin de lui
permettre de rejoindre le point de Lagrange L2 du système
Terre-Lune. Mais il ne se contente pas de cela, et comporte lui-même
une importante instrumentation scientifique, dont un spectromètre
radio à basse fréquence fourni par les Pays-Bas.
Un point de Lagrange est une position de
l'espace dans un système à deux corps, où leurs champs de gravité se
combinent de manière à fournir un point d'équilibre à un troisième
corps de masse négligeable, tel que les positions relatives des
trois corps soient fixes.
L'avantage du point de Lagrange L2, situé à
455.000 km de la Terre, est de rester en permanence visible depuis
notre planète et de la face cachée de la Lune. Il s'agit du premier
satellite de communications positionné sur un point de Lagrange.
Jean
Etienne
|